Motion of the Robot & Claw
The motion of the claw mechanism and arms will be attached to servos and is prescribed. The servos are controlled by an Arduino Uno board. Each block position was defined and measured. Delta robot inverse position kinematics were used to determine what angles were required for each arm to get to those positions and then calibrated for each servo. The claw servos were programmed to open and close the fingers, and then to rotate the whole claw.
The VarSpeedServo library, an open source library that allows for servo speed control, was used. To read more about this library, click here.
Click below to download and view our code.
The VarSpeedServo library, an open source library that allows for servo speed control, was used. To read more about this library, click here.
Click below to download and view our code.
| finalcode.ino |
Delta Robot Inverse Position Kinematics
Click below to download our Matlab code that uses Delta Robot Inverse Position Kinematics to translate a desired position into angles of the robot arms.
| designreviewii.m |
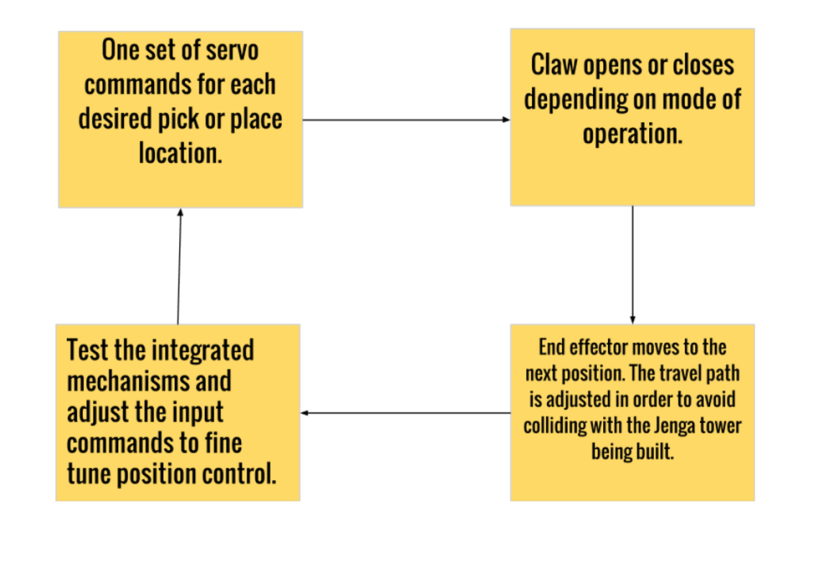
Software Flow Chart
Camera Vision [Incomplete]
Our ultimate goal was to implement a camera vision system. Using the PS3 Eye Camera and open source code (http://www.instructables.com/id/The-EyeWriter-20/), we aimed to have autonomous detection of random blocks. However, we had trouble with software compatibility and were unable to finish in time.
|

|
