
|
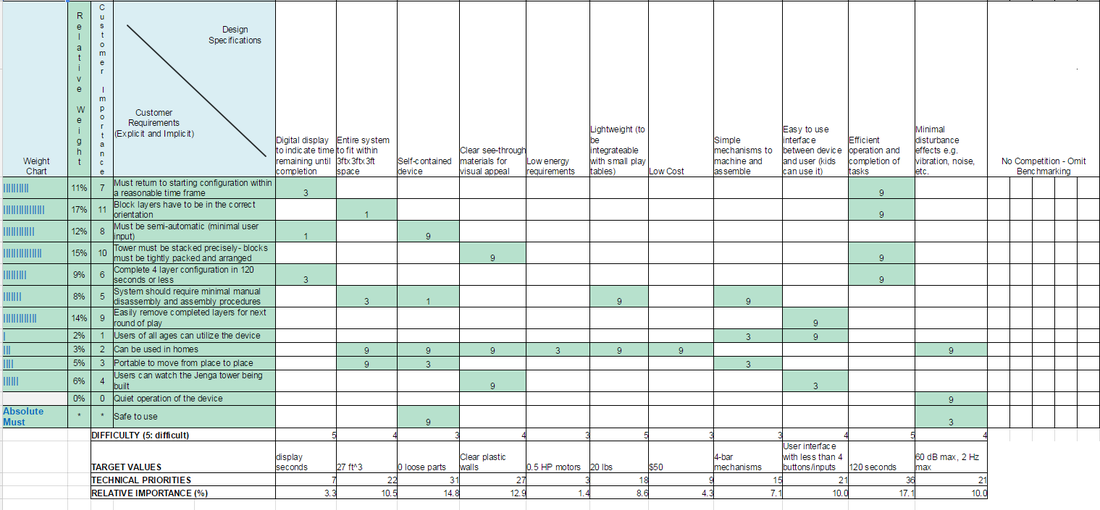
SpecificationsThe customer needs were sourced through our team’s own brainstorm and interviews with other potential users. A needs comparison chart was formed to determine which of the needs were the most important, and it was quickly determined that the device’s safety was a must. Needs such as the precision of the Jenga tower, speed at which it’s built, and accessibility to the user were ranked high in terms of priority, while its use as a portable consumer device was less of a priority. This comparison chart led us to the device’s engineering requirements, and it also changed the scope of the device; rather than a device that would solely build a whole tower, the customer wanted the device to focus on a visual experience and the aesthetics of the device. This was a significant conclusion gained from the QFD that guided us to our engineering requirements.
|
Concept Generation and Selection
Our two broad approaches for implementing this project are either using a sorting mechanism to arrange blocks and build the Jenga tower, or using a robot arm to manually place each individual block. The general idea behind the sorting mechanisms is that they would feed to an assembly platform through a conveyor belt or linear actuator, and then the platform would move and rotate as layers are added to the tower. The robot arm is a fairly straightforward idea, and consists of an arm that has multiple degrees of freedom and actuation. All of our concepts drew inspiration from industrial factory lines that can efficiently assemble rows of products as well as from advanced manufacturing robot arms that can precisely position the desired product.
