Acknowledgement
Special thank you to the Delta Droid team for the entire Delta robot base structure fixtures and components. Their hardware contributions to our project are detailed below and their project is featured in the following link. (http://courses.me.berkeley.edu/ME102B/Past_Proj/s14/group14.mp4)
We aimed to create an original system with our claw design, original code, and a camera vision system for autonomy. Unfortunately, the camera vision was not implemented due to time constraints.
We aimed to create an original system with our claw design, original code, and a camera vision system for autonomy. Unfortunately, the camera vision was not implemented due to time constraints.
Structure & Hardware
Base (as designed by Delta Droid team)
|
Below is the work of the Delta Droid team, summarized to give context for what our team designed.
The shape of the delta robot was defined as a triangular base plate connected to a triangular end effector through three parallel arms. In order to support the base plate, a hexagonal plate allowed room for mounting the three arms as well as structural supports. The servo motors for the three arms were mounted at the edges of the top plate, forming the triangular base. All electronic components in the both the original project and in ours were housed on the large vertical side plate for ease of access. All components contributed by the Delta Droid team and utilized in our device are detailed in the CAD model to the right, with the exception of the three vertical slotted tubes, which were replaced by us with longer tubes of the same design. The contributed parts include: the two hexagonal base plates on the top and bottom, three servos, three sets of brackets, three roller bearings, six carbon fiber tubes and their ball bearing ends, three shorter metal arms, plastic end effector, the bottom hexagonal ring, and all corresponding bolts and fasteners for all of the parts listed above. No modifications were made to fixtures, with the exception of those listed below. Below is our team's work. We verified the dimensions of the existing robot in the parameter analysis. Taking into account the vertical travel range of the arms as well as the height of the claw, we extended the frame using longer slotted tubes so that it can comfortably hold 4 layers of Jenga blocks while still allowing room for the claw to move. We used CNC machining to cut three different slots into the base plate, two for block loading, and one as a target building zone for the tower. |
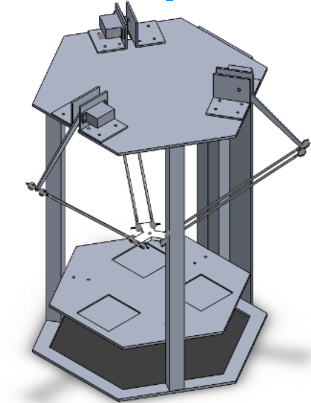
Above: CAD model we created of Delta Droid team's robot, with base modifications.
|
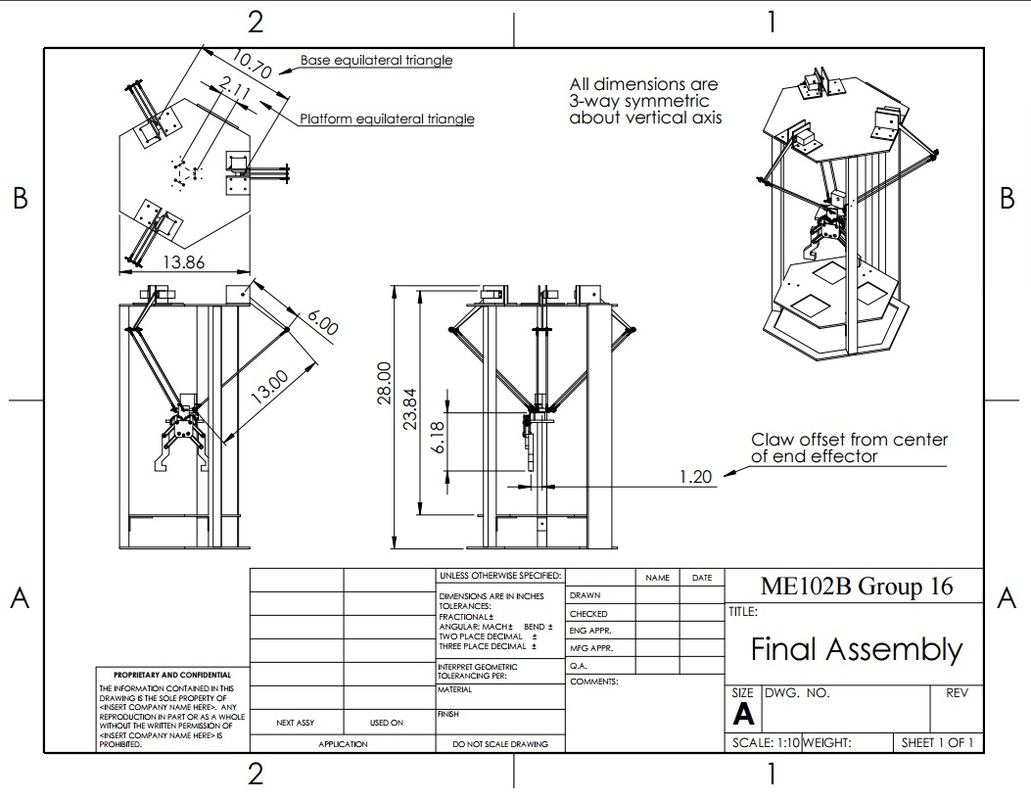
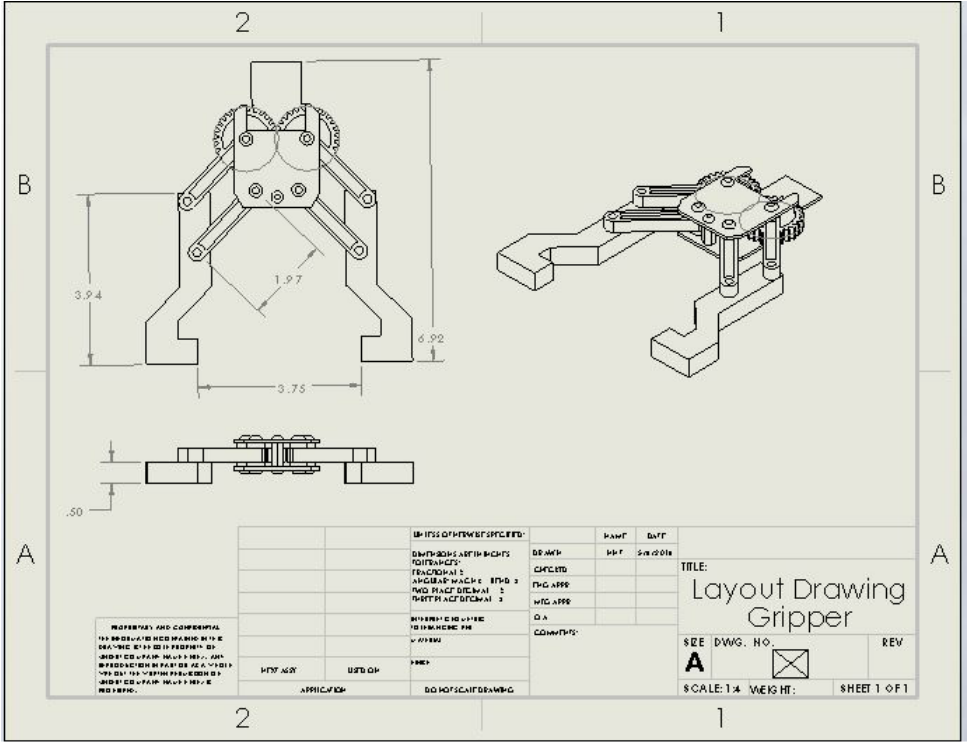
Above: Layout drawing of complete assembly, including both the Delta Droid design as well as claw design.
Claw (as designed by our team)
In order to actually grab and place blocks, the robot needed some sort of mechanism to be added to it. After going through various ideas like a vacuum pump or a crane-like arm, adding a mechanical gripper made the most sense.
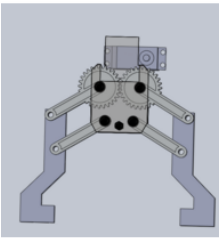
The geometry of the gripper allowed it to grab a Jenga block lengthwise (along the 3 inch face), thus allowing the gripper to place the blocks without interfering with other placed blocks. The gripper was operated by a servo that rotated the two gears attached to the claw. Furthermore, the gripper rested on a platform that was attached to the end user through a servo, thus allowing the gripper mechanism as a whole to rotate.
Below is a layout drawing of our gripper.
The geometry of the gripper allowed it to grab a Jenga block lengthwise (along the 3 inch face), thus allowing the gripper to place the blocks without interfering with other placed blocks. The gripper was operated by a servo that rotated the two gears attached to the claw. Furthermore, the gripper rested on a platform that was attached to the end user through a servo, thus allowing the gripper mechanism as a whole to rotate.
Below is a layout drawing of our gripper.